

Новые принципы и подходы к управлению судами рыбопромыслового флота при решении задач поиска и облова косяков рыбы
Еще в далеком 2012 году, когда не шло речи о санкциях и на все суда России устанавливалось импортное оборудование, да и сами суда в основном строились за рубежом, правительство России уже задумывалось об импортозамещении. Для этого открывались новые федеральные целевые программы (ФЦП), направленные на разработку и создание отечественного оборудования, в том числе для морских и речных судов.
Одним из результатов стала опытно-конструкторская работа «Разработка технологии создания автоматизированных систем управления технологическими процессами (АСУ ТП) судов промыслового флота, с разработкой технического проекта и действующего макетного образца», шифр «АСУ-ТП-СПФ», выполненная АО «Концерн «НПО «Аврора» в рамках ФЦП «Развитие гражданской морской техники на 2009-2016 годы».
Целями работы стали:
1. Разработка технологии автоматизированных систем управления технологическими процессами перспективных (создаваемых) судов промыслового флота (АСУ ТП СПФ), обеспечивающей поиск и облов косяков рыбы, координированное управление рыбопромысловым оборудованием, главными двигателями, электроэнергетической системой, рыбоперерабатывающим оборудованием и другими техническими средствами судна, а также информирование персонала.
2. Сокращение численности и снижение интенсивности труда экипажа.
3. Повышение безопасности плавания судов промыслового флота.
4. Повышение качества управления судном, комфортности работы операторов при работе в одиночку или в составе группы судов.
Одной из основных задач проекта была интеграция всего оборудования и всех систем судна в единый комплекс.
Созданная в результате АСУ ТП СПФ обеспечивает автоматизацию следующего оборудования и судовых систем СПФ:
- рыбопоисковый комплекс;
- рыбопромысловое оборудование;
- рыбоперерабатывающее оборудование;
- главная энергетическая установка с винтом регулируемого шага и валогенераторами;
- судовая электростанция;
- вспомогательные механизмы;
- технические средства управления движением и маневрированием судна, в том числе навигационное оборудование и оборудование связи;
- система пожарной сигнализации;
- общесудовые системы.
Рыбопромысловые суда работают в специфических режимах, отличающих их от других типов морских судов. В частности:
- вылов, переработка сырья и изготовление готовой продукции (с целью недопущения порчи рыбы и других морепродуктов, свободные от вахты члены экипажа могут привлекаться на подвахту);
- складирование и хранение готовой продукции в трюмах;
- перегруз в море готовой продукции на транспортные суда или плавбазы с привлечением свободных членов экипажа на подвахту.
Кроме того, для рыбопромысловых судов характерна увеличенная численность экипажа. На некоторых типах крупнотоннажных судов она достигает 100 и более человек, большинство из которых — это специальный персонал для добычи и переработки рыбы.
Для добывающих судов на базе современного оборудования и средств промышленной автоматизации была разработана АСУ ТП, позволяющая контролировать различные процессы на операторских станциях с помощью модулей ввода/вывода, расположенных в машинных, грузовых отделениях судна.
Системная архитектура построения АСУ ТП является децентрализованной для обеспечения безопасности и простоты монтажа. При этом управление и эксплуатация всех элементов системы осуществляется централизованно с операторских станций.
В состав АСУ ТП входят следующие функциональные подсистемы:
- система «АСУ-ТП-СПФ-О» — интегрированная рыбопоисковая система (ИРПС), включающая в себя гидролокатор кругового обзора (ГКО) и систему контроля параметров трала (СКПТ);
- система «Улов» — системы формирования и ведения электронного промыслового журнала и передачи информации в береговой центр;
- система внешней связи — система средств радиосвязи и навигации;
- система «Корракс-РМС» — система автоматизированного управления движением (САУД);
- ИСУ ТС «Авролог ТС СПФ» — интегрированная система управления техническими средствами;
- система «Авролог РПО СПФ» — система управления рыбопромысловым оборудованием;
- система «Авролог НК СПФ» — система расчета безопасности судовождения и маневрирования.
Система «АСУ-ТП-СПФ-О» ИРПС решает задачи:
- поиск, обнаружение, сопровождение (в том числе автоматическое) рыбных скоплений;
- контроль параметров орудий лова.
Для этого она должна обеспечивать сбор, обработку, передачу в АСУ ТП и отображение информации от следующих систем:
- гидролокатора кругового обзора для поиска, обнаружения, сопровождения (в том числе автоматического) рыбных скоплений;
- гидроакустической системы контроля параметров трала (СКПТ) для контроля параметров орудий лова.
Наиболее полно выполнение задачи поиска, обнаружения, сопровождения (в том числе автоматического) рыбных скоплений обеспечивается работой гидролокатора кругового обзора (ГКО) со сферической антенной, так как она обладает важнейшим преимуществом — всенаправленностью. Это позволяет сформировать характеристики направленности (ХН) во всей нижней полусфере.
Поэтому сферическая антенна может быть использована сразу в нескольких режимах:
- горизонтальное сканирование (круговой обзор) ХН по всем направлениям в тонком слое (шириной около 10º по вертикали) горизонтального кругового сектора (на 360º), с возможностью наклона плоскости относительно горизонта от 0 до 90º (обнаружение косяков рыбы на различных глубинах, определение размера и формы косяка, слежение за ним, оценка биомассы);
- вертикальное сканирование с наклоном плоскости относительно горизонта от 0 до 90º и c возможностью поворота сектора вокруг вертикали на 360º (определение размера и формы косяка, слежение за ним, обнаружение придонной рыбы, оценка биомассы).
На основе полученных данных формируются изображения этих разрезов, а также может быть сформирована трехмерная картина подводной обстановки.
ИРПС должна обеспечивать:
- обнаружение рыбных скоплений с эквивалентным радиусом 2 м на дистанции не менее 1400 м;
- определения дистанции до цели с погрешностью не более 2% от шкалы установленного диапазона, направления — не более 5º;
- автоматическое слежение за рыбным скоплением;
- инструментальное определение плотности и объема биомассы в обнаруженном косяке;
- возможность передачи данных от ИРПС в АСУ ТП.
Система «Улов»
Система ведения электронного промыслового журнала (ЭПЖ) и передачи информации в береговой центр (ПИБЦ) предназначена для создания базы данных промысловых событий (установка/снятие рыболовной снасти, перегруз улова с судна на судно, выгрузка улова в порту и так далее) с возможностью добавления записей и выдачи отчетов.
Электронная картографическая навигационно-информационная система решает следующие основные задачи:
1. Расчет и отображение положения центра плотности косяка (ЦПК) рыбы и параметров его движения в географической системе координат с учетом скорости движения, крена, дифферента и рыскания судна.
2. Вычисление координат точки отдачи кошелькового невода (ТОН) с учетом вектора движения обнаруженного рыбного косяка (в режиме автоматического сопровождения косяка рыбопоисковым гидролокатором) и направления ветра.
3. Вычисление рекомендуемого курса судна в ТОН.
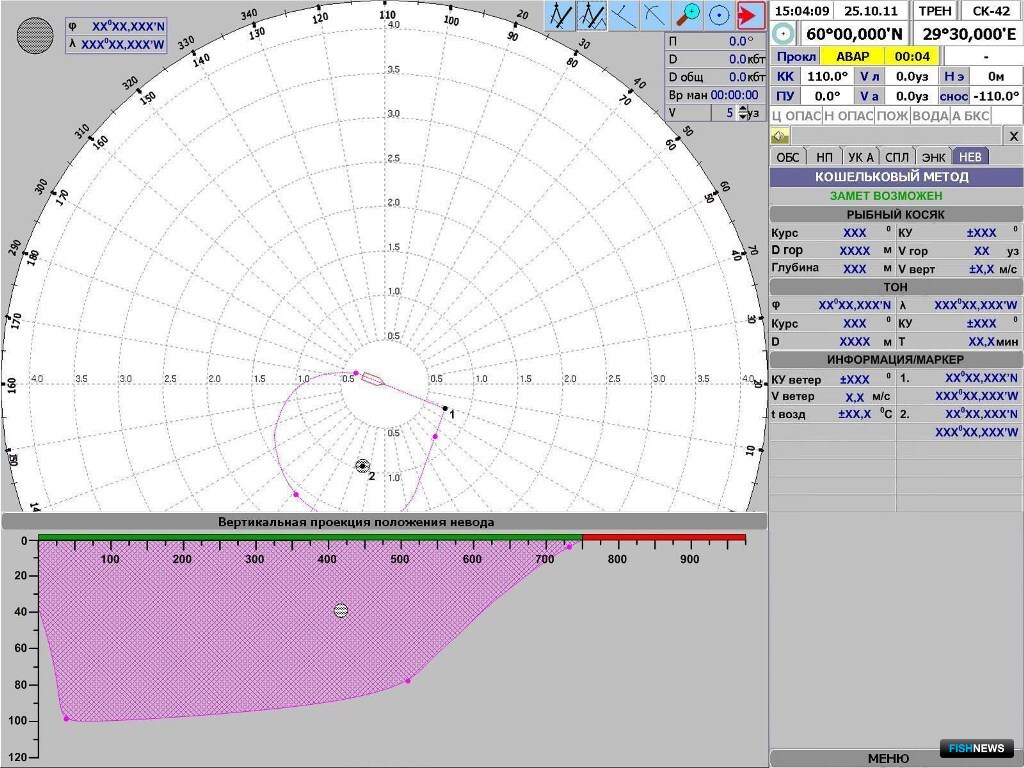
4. Расчет траектории замета кошелькового невода в условиях подвижного косяка и заданной длины снасти (рис. 1).
5. Вычисление дистанции, курса и скорости «забега» судна (в случае трала на борту) при траловом пелагическом лове с учетом вектора скорости косяка и расстояния до него.
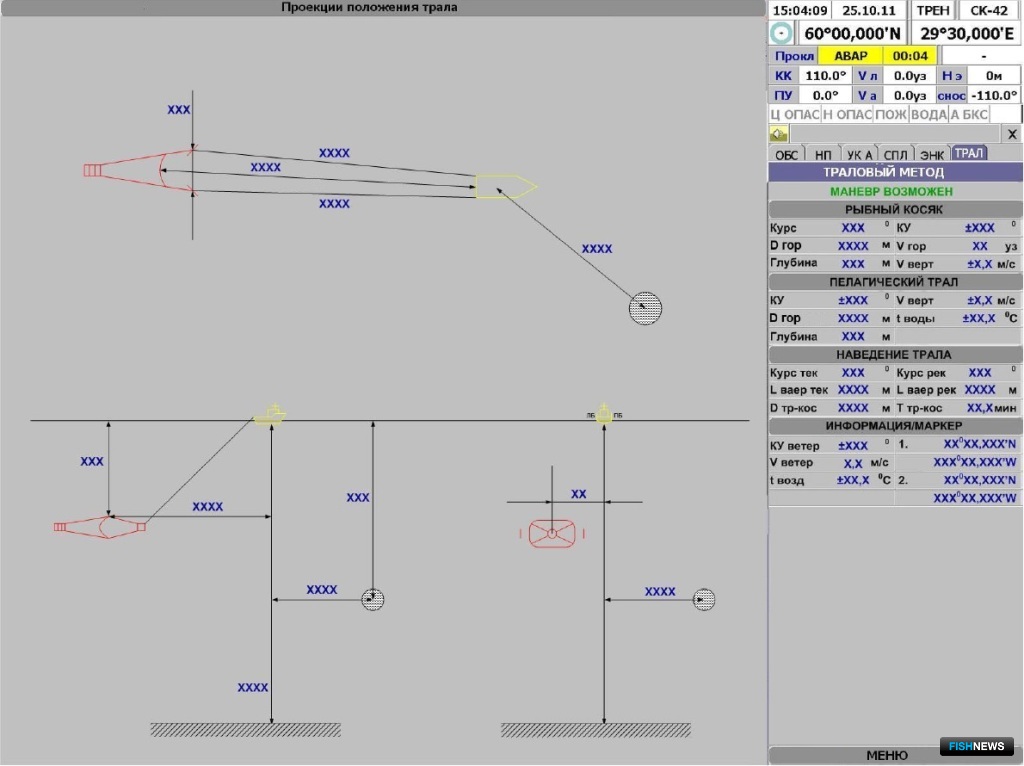
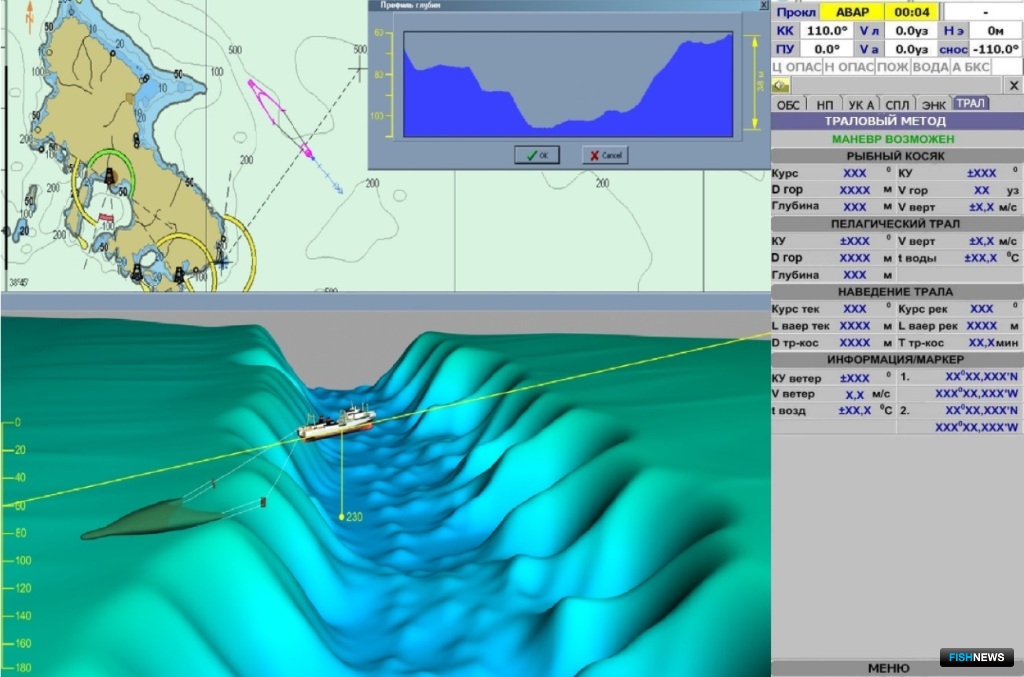
6. Вычисление оптимальных значений курса судна и длины вытравленных ваеров при выбранной скорости судна в случае прицельного облова подвижного косяка тралом (рис. 2).
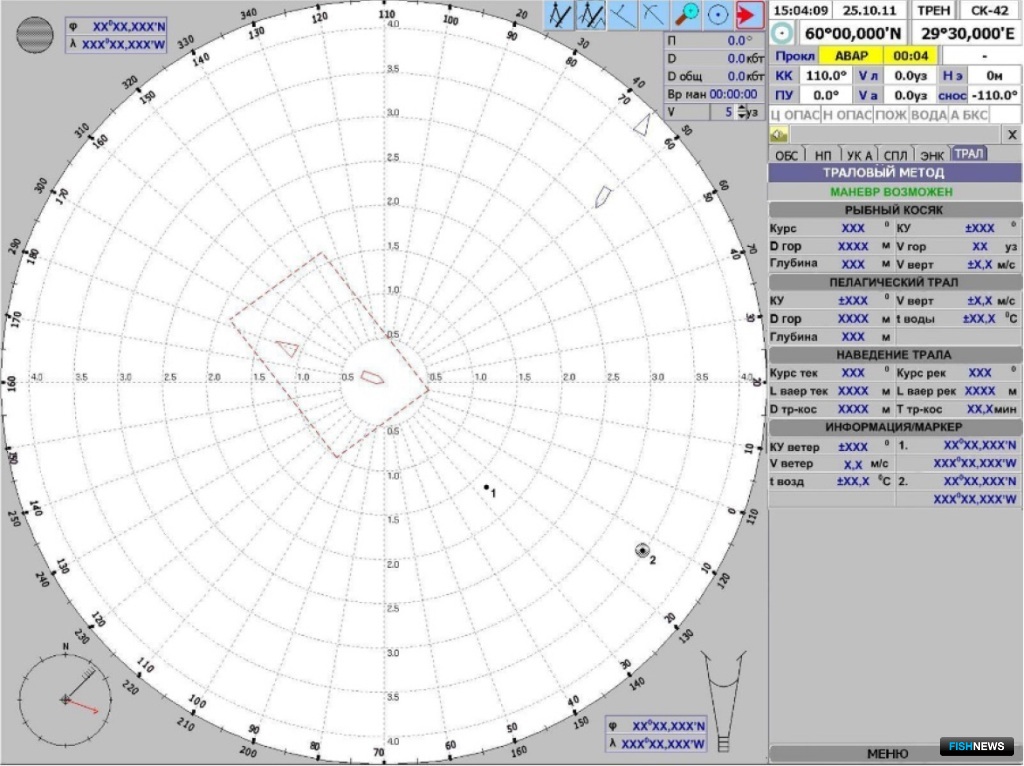
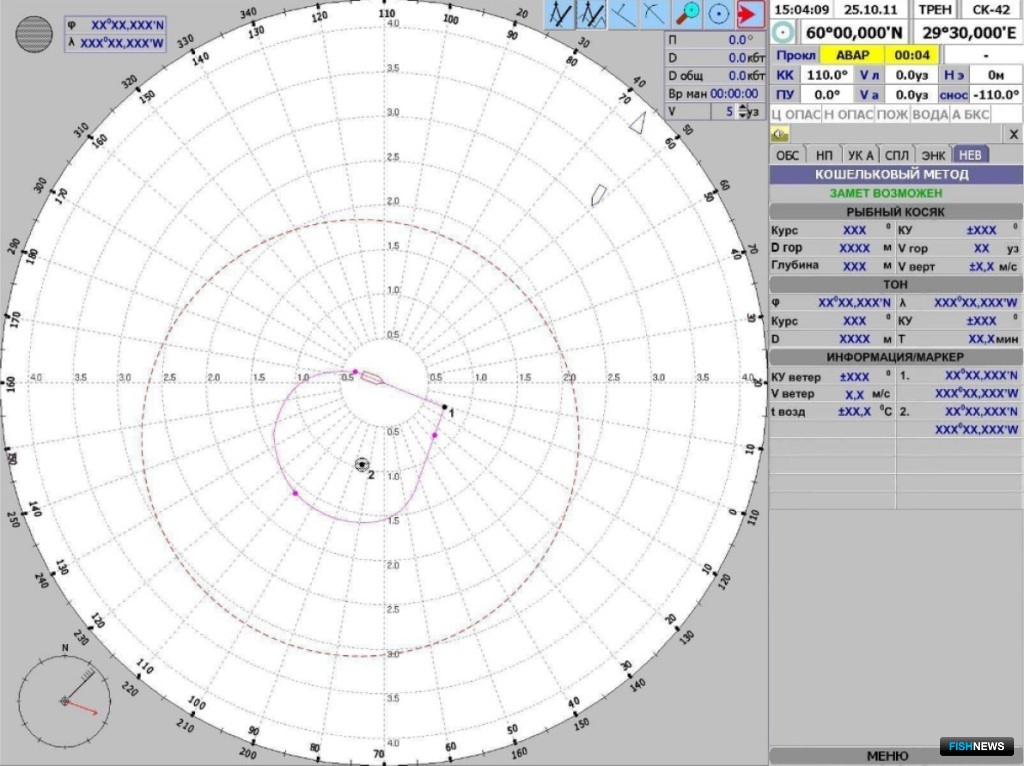
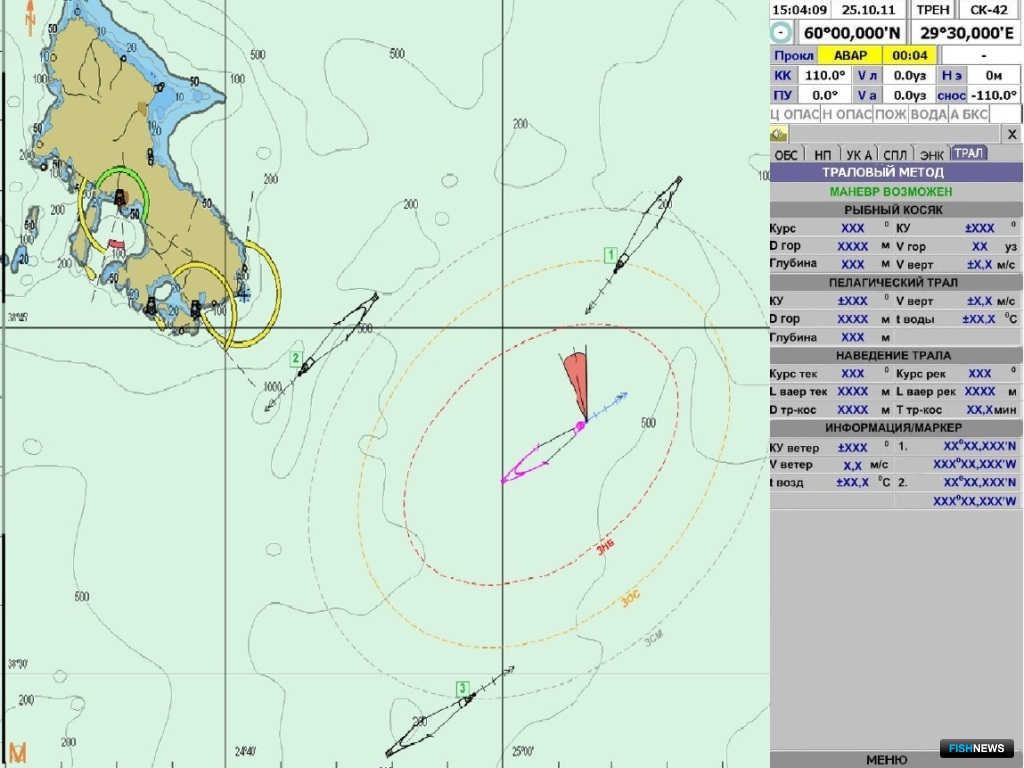
7. Определение границ зоны навигационной безопасности вокруг своего судна при групповом траловом и кошельковом лове (рис. 3-4).
8. Отображение 3D-модели морского дна, судна и орудий лова. Трехмерный вид может быть совмещен с морской картой для оценки навигационной безопасности. В отдельном окне отображается профиль дна вдоль диаметральной плоскости судна на основе данных от эхолота (рис. 5).
9. Обеспечение безопасности судовождения и расхождения судов при групповом промысле. Предусматривает расчет и визуализацию зон безопасности вокруг судна без орудий и с орудиями лова. На экране отображаются границы зоны свободного маневра (ЗСМ), зоны опасного сближения (ЗОС) и зоны навигационной безопасности (ЗНБ) (рис. 6).
Входящая в АСУ ТП СПФ система управления техническими средствами позволяет обеспечить совместную работу с главными и вспомогательными двигателями, вспомогательными и общесудовыми техническими средствами, противопожарными средствами и якорно-швартовыми устройствами. Вся необходимая информация представляется на едином пульте управления, находящемся в навигационно-промысловой рубке. АСУ ТП СПФ разработана с обеспечением класса автоматизации AUT1, который не требует наличия постоянной вахты в машинном отделении и в ЦПУ, что обеспечивает сокращение численности экипажа.
Совокупность характеристик АСУ ТП СПФ позволяет утверждать, что данная система является конкурентоспособной на внутреннем российском и зарубежных рынках.
АСУ ТП СПФ обеспечивает оптимальное решение рыбопоисковых задач, координированное управление рыбопромысловым и прочим оборудованием судна. Эта технология улучшает качество управления экипажем и его информирования, повышает надежность и безопасность эксплуатации судна с учетом специфики района промысла.
Результаты выполненияОКР подтверждают возможность АО «Концерн «НПО «Аврора» изготавливать и поставлять современные комплексные автоматизированные системы управления технологическими процессами для различных типов судов промыслового флота. Они соответствуют лучшим мировым образцам и удовлетворяют требованиям заказчиков.
194021, Санкт-Петербург,
ул. Карбышева, д. 15
+7 (812) 607-56-34
mail@avrorasystems.com
Директор научно-производственного центра «Автоматизация гражданских судов и кораблей» Роман ПЕТРОВ
Журнал «Fishnews — Новости рыболовства»
Реклама
















